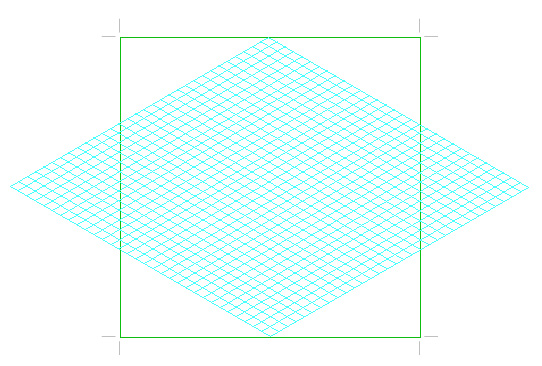
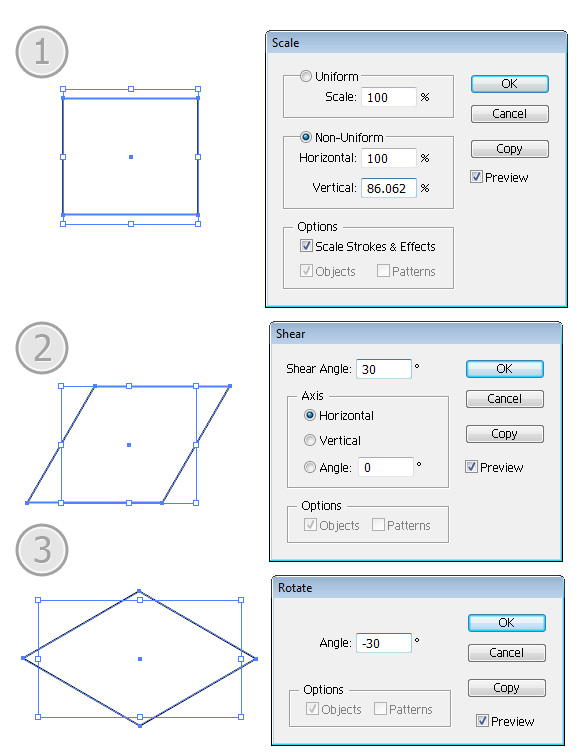
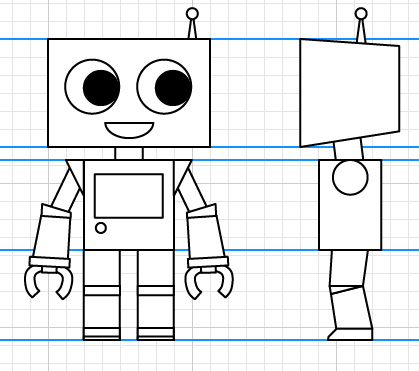
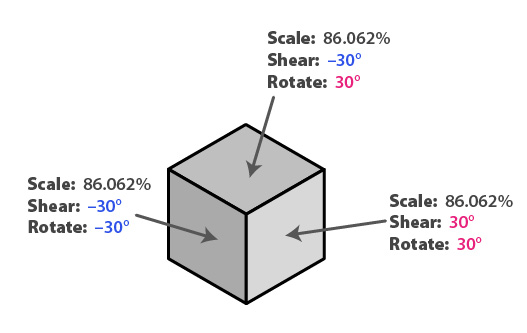
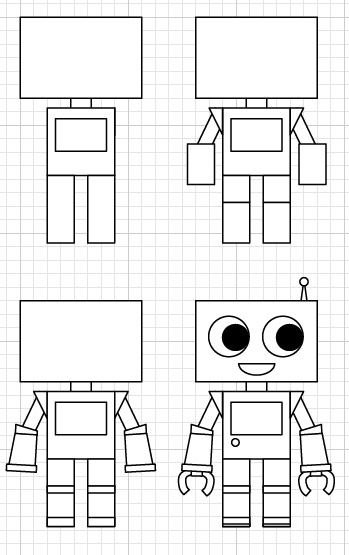
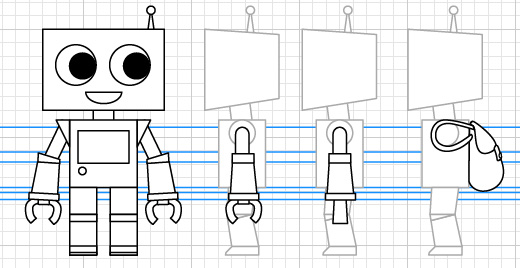
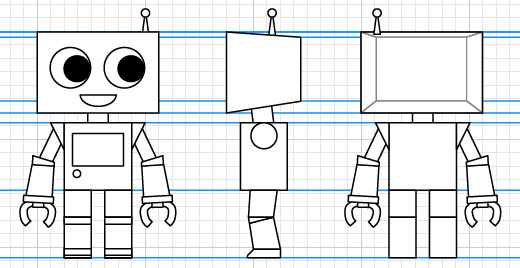
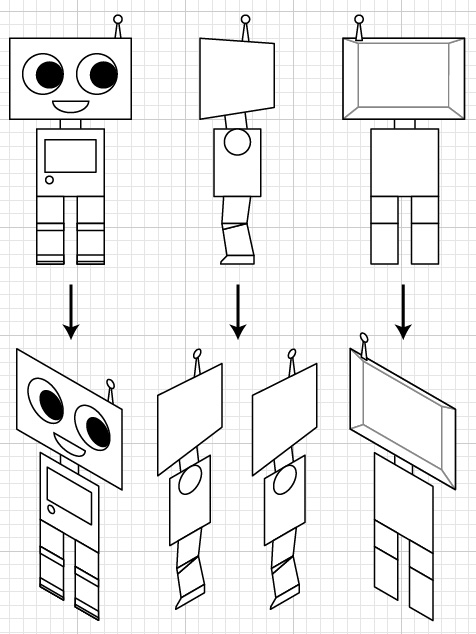
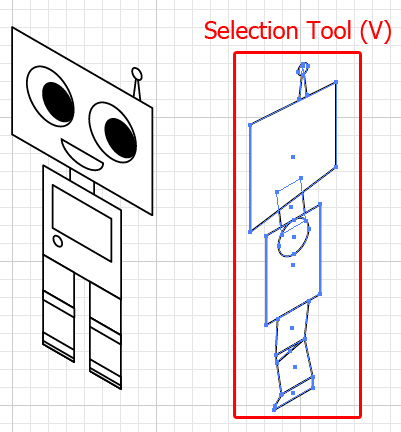
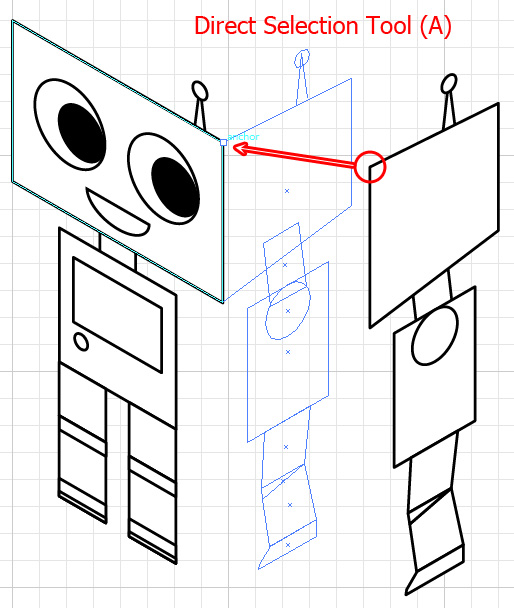
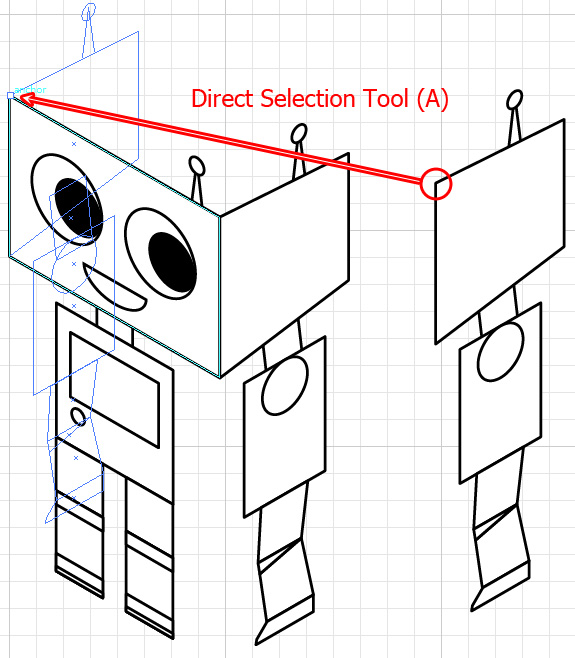
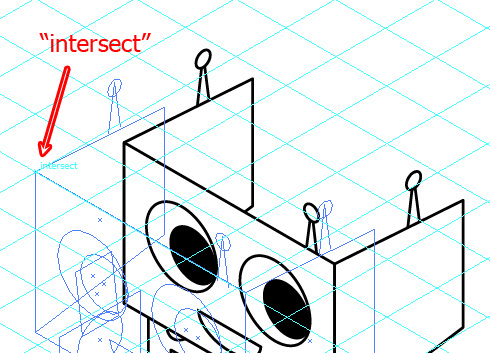
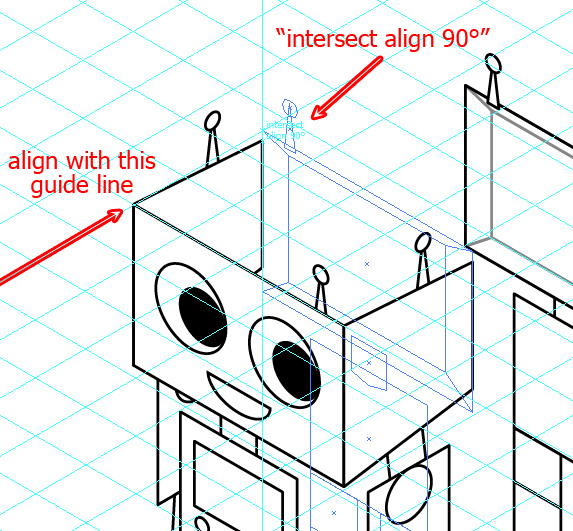
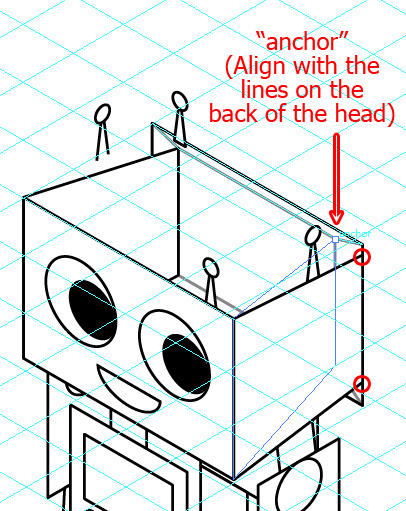
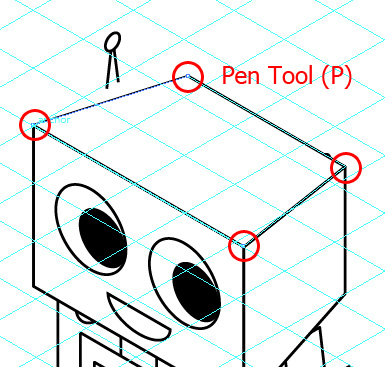
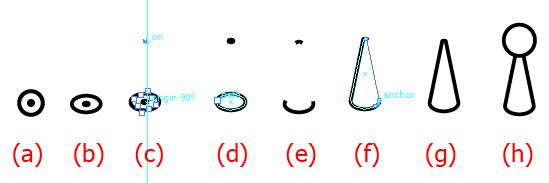
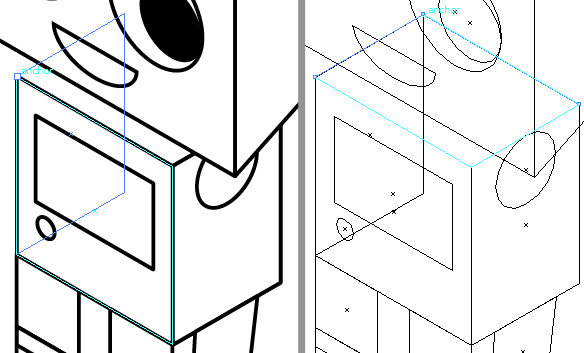
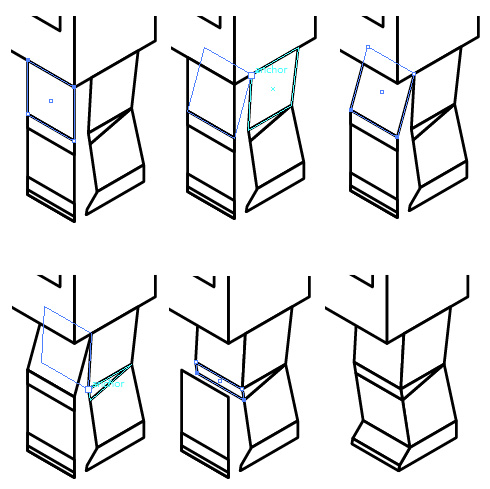
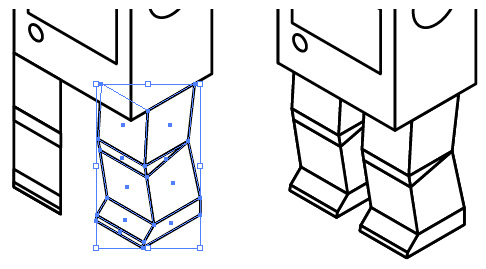
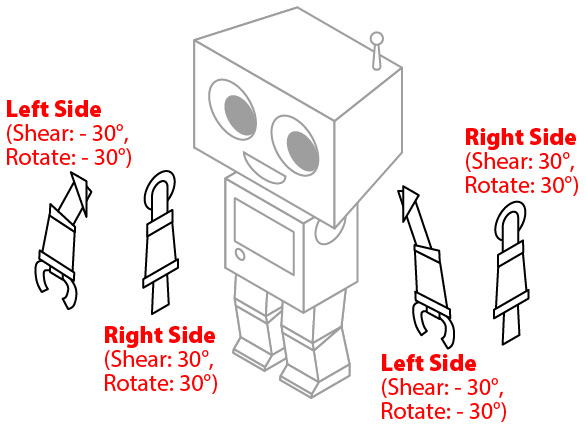
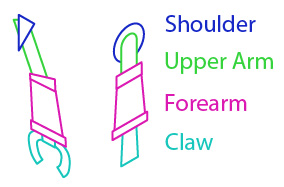
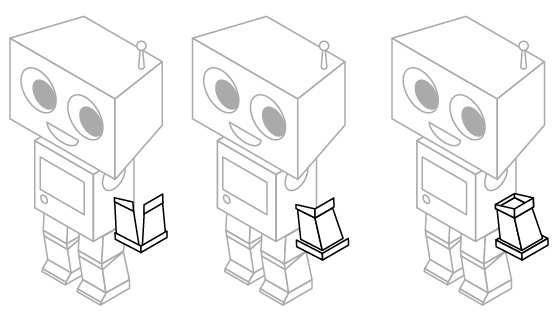
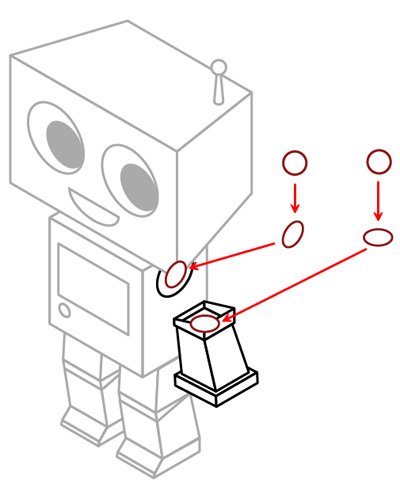
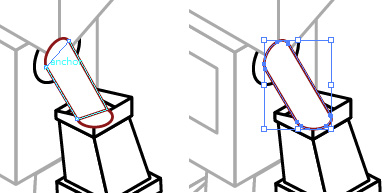
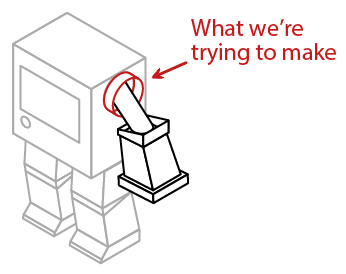
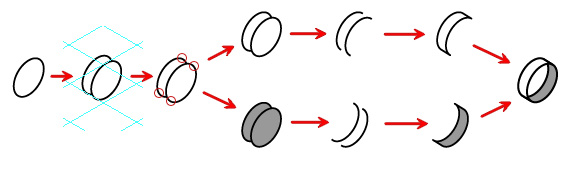
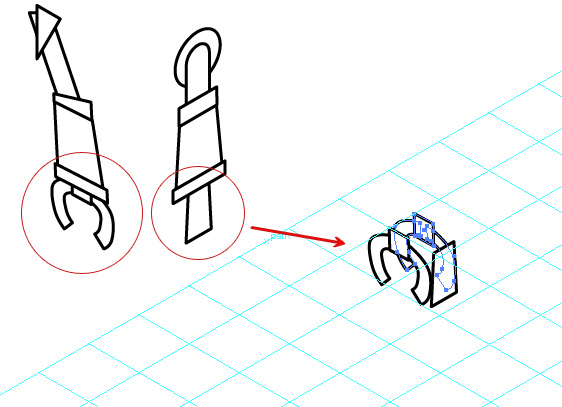
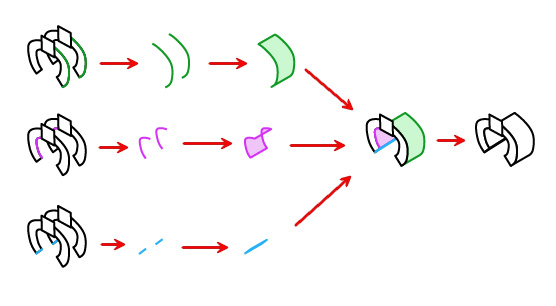
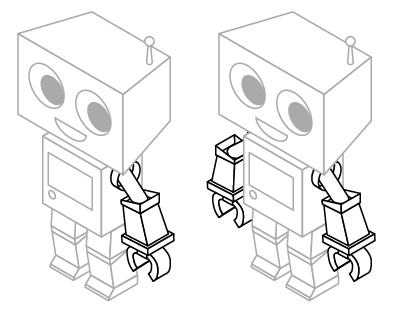
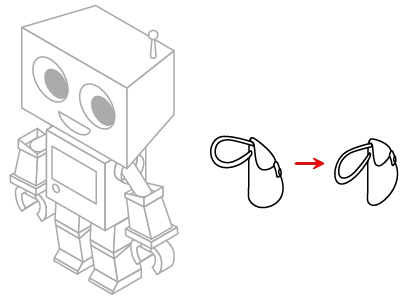
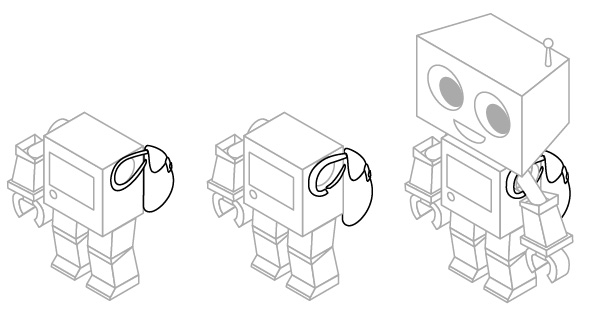
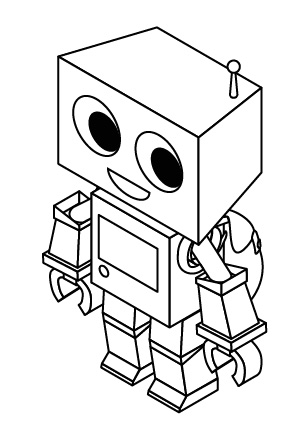
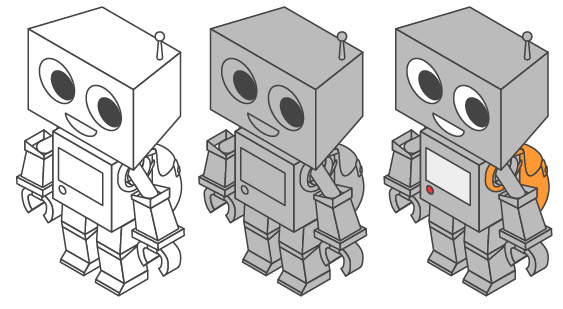
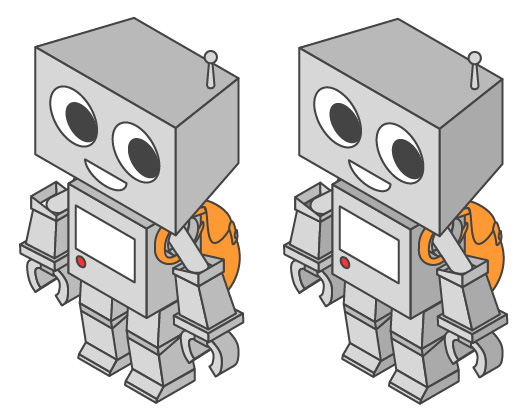
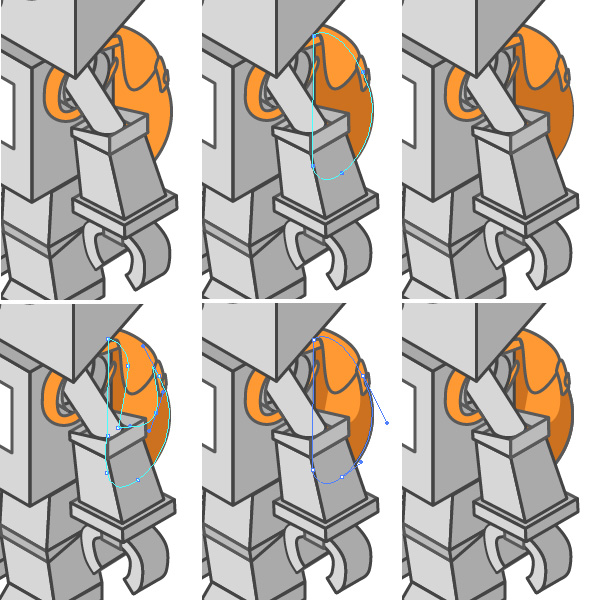
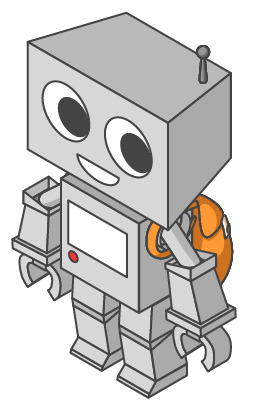
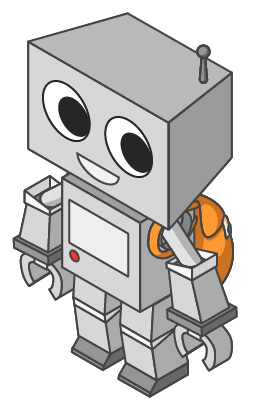
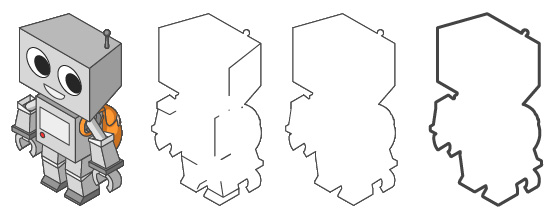
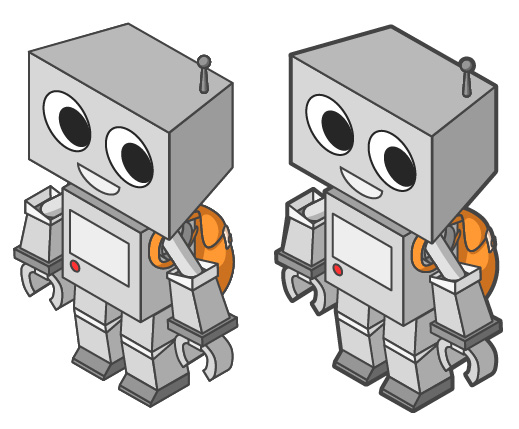
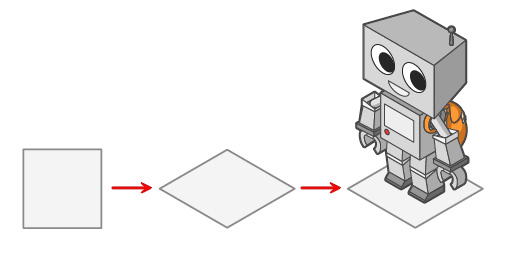
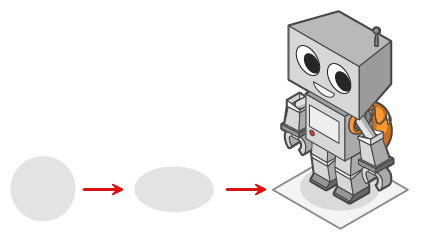
, hvordan der kan skabes en sød robot kamp sprite med reformen af sikkerhedssektoren i adobe illustrator,,,,,,, i denne forelæsning, vil du lære at anvende en kombination af ssr - (omfang, forskydning, dreje) metode og adobe illustrator retningslinjer for en isometriske robot.isometriske billeder er perfekt for diagrammer og spil nisser.så lad os se, hvordan denne søde isometriske robot...,,,, trin 1, åbner en ny illustrator dokument.størrelse og beslutning af dokumentet, er ikke så vigtigt, så vælg noget, du har lyst til.,, trin 2, før vi begynder, er det vigtigt at definere, hvad vi mener, når vi siger, at vi vil foretage en, isometriske, genstand, isometriske perspektiv er en måde at trække en 3d - objekt i 2d. det bruges i tekniske tegninger, tegnefilm byer og 2d kampe, som vil se 3d. isometriske perspektiv er at foretrække frem for normale perspektiv, fordi alle genstande, vil være af samme størrelse, uanset hvor langt væk fra skærmen er de. vi starter med at oprette et net til at fungere som isometriske vores guider.de teknikker, så viser jeg dig i denne artikel bygger på ssr - metode, som står for, omfanget, forskydning, drej,.ud over denne metode, tegner retningslinjer vil komme i handy senere, når i kø former i isometriske perspektiv. skabe retningslinjer ved hjælp af denne hurtige tips: hvordan kan man skabe en isometriske net på mindre end 2 minutter.næste, tænd for klog leder under betragtning> klog leder, trin 3, da en hurtig opfyldning af ssr - metode, vil vi gøre det foran, side, på toppen af en terning.start ved at trække et kvadrat med rektangel værktøj (m) og holder vagt, samtidig med at den mus.tre eksemplarer af den plads, som vil blive den øverste og to sider af en isometriske terning. vi vil begynde med toppen.højreklik på beholderen og udvælge omdanne> omfang og indlede en værdi af 86.062% i ikke - ensartet> vertikale input område.næste, right-click igen og vælge at omdanne> forskydning, og ind i en klippe vinkel på 30 grader.til det sidste skridt, højre klik og udvælge omdanne> rotere, og ind i en vinkel på - 30 grader, alternativt, kan du bruge den ændre vindue med samme procedure og ndash; blot ændre højde (benævnt h) 86.062%, så den klippe til 30 grader, og endelig rotation til - 30 grader.begge metoder giver samme resultat.,, til venstre og højre side af terningen kan vi følge samme procedure med forskellige dele og roterer vinkler.disse værdier er sammenfattet i billedet nedenfor.,, trin 4, med disse teknikker under vores bælter, vi kan fortsætte med at gøre vores robot karakter.den robot, jeg gør i denne lektion er hovedpersonen i en isometriske spil, jeg har arbejdet på, robotok. io. start ved at dreje på den normale, 2d net ved at klikke på> vise kvadratnet (ctrl + ").da den robot er ret rektangulær, kan vi bruge den rektangel værktøj (m) til at konkretisere de store træk.pennen værktøj (p) og den direkte udvælgelse værktøj (a), også komme i handy, og gøre det muligt for os at give robotten lidt karakter.,, løntrin 5, ved hjælp af foran robotten som reference, kan vi drage den side af robot.jeg har brugt linjesegment redskab (er) til at sætte nogle blå linjer bag billedet til at op dele af den robot er lig.du kan flytte linjerne op og ned på den del af det, at du arbejder på for øjeblikket.under de dele og korrekt, vil de senere trin meget lettere, når vi bruger disse synspunkter for at gøre den robot isometriske.,, trin 6, få en kopi af det ud og ændre slagtilfælde farve grå.nu kan vi trække våben på toppen af side for at gøre det lettere at se vores nye linjer.vi kan også ændre placeringen af vores blå vandrette linjer for at hjælpe os med det ud i armen med foran robotten har også brug for en rygsæk til at holde hans ting, så lad os gøre det synspunkt, med den samme metode.,, trin 7 endelig drage tilbage af den robot med forsiden og side som reference.her har jeg brugt lighter linjer på bagsiden af hovedet for at hjælpe disse linjer, skiller sig ud fra de andre, som de viser omfanget af hovedet.,, trin 8, nu hvor vi har tegningerne er på plads, kan vi begynde at bygge 3d - robot med vores isometriske ssr - metode og de retningslinjer, vi har gjort tidligere.lad os begynde med at arbejde med hoved og krop (lad armene og rygsæk til nu) af robot til at opbygge en isometriske set forfra. få en kopi af foran robotten, fjerne våbnene, og reformen af sikkerhedssektoren, det skulle være en venstre side (omfang: 86.062% forskydning: - 30, roterer: - 30).gentag ssr - processen med den robot, sørg for at fjerne våben. nu vil vi gøre det samme med den side af (armless) robot, men vi vil gøre det på den rigtige side (omfang: 86.062% forskydning: 30, roterer: 30).lav en kopi, som vi kan bruge til den anden side af robot.,, at holdning de to sider af robotter, udvælge hele den ene side af robot ved udvælgelsen værktøj (v) og derefter gå over til den direkte udvælgelse værktøj (a),.,, trækker den øverste venstre anker punkt at overlappe med tilsvarende hjørne på forsiden synspunkt.hvor smart guide siger, anker, (cyan tekst), slip den mus knap.,, gør den samme ting med den anden side af robot.når den anden side af robot er placeret, så hold det udvalgte og tryk ctrl + forskydning + [til at flytte disse figurer bag de andre.,, trin 9, at den robot er hoved er lidt mere indviklet.på dette punkt bør vi slukke nettet (ctrl + ") og vende sig mod vores isometriske vejledninger (ctrl +).vælg hele robot (v) og skifte til den direkte udvælgelse værktøj (a).vælg et punkt på den øverste foran robotten er hoved, og træk den over til sammen med guiden.vi kan bruge denne vejledning linje op bag den robot foran.,, vælges den tilbage (v) og skifte til den direkte udvælgelse værktøj (a).trække robotten fra et punkt på toppen af hans hoved til samme linje, der er tilpasset den front.træk det langs denne linje indtil tilbage omrids lige på linje med de sider af robot hovede.,, at vi nu kan udvælge baghovedet punkter på siden (se billede) med den direkte udvælgelse værktøj a) ved hjælp af skift klik for at få de to ting på en gang.trække disse punkter at hamle op med hovedet (igen, vente, indtil de ord, anker, findes i cyan tekst før frigivelsen af).når disse ting er på plads, så vi ikke længere behøver den robot, og kan slette det ved udvælgelsen af alle former for udvælgelses - redskab (v) og at slette.,, at komme i form af hovedet, vi kan bruge pennen værktøj (p) at trække i toppen.klik på hver af de fire punkter, der udgør toppen af robot er hoved, hver gang der venter på ordet, anker, skal anføres.endelig forbinde den sidste kant.tryk ctrl + [et par gange for at komme videre med denne nye form tilbage, indtil du kan se alle antenne former.hvis du går for langt, bruge ctrl +] at fremsætte det igen.,, trin 10 robotten er antennen består af to dele: en kegle, og et område, at gøre en isometriske kegle, vi starter med to cirkler overlejret (trin a), med en større end de andre, og vi ssr - at være flad som toppen af en terning (trin b).holder vagt, flyt den mindre på vertikalt indtil form er den højde, vil du have (punkt c).ved hjælp af tilføje anker punkt værktøj (+), tilføje punkter til de sider af bunden cirkel, som vist (trin d).så brug den direkte udvælgelse værktøj a) at udvælge de i punkt både kredse og slette dem med det centrale (punkt e).gå tilbage til pen værktøj (p) og forbinde de resterende punkter (punkt f), for at gøre din kegle (punkt g). siden kan vi gøre isometriske område til toppen af antennen.tegn en cirkel, og det er det!en isometriske område er ganske enkelt en regelmæssig cirkel (punkt h).position antennen på toppen af robot er hoved.,, trin 11, vi næste gang kan holdning liget af den robot ved hjælp af de samme teknikker, som vi plejede at få hovedet.slette halsen former (siden vi ikke kan se hals fra dette synspunkt) og den anden side af det organ, der ikke længere er synlige.dette vil hjælpe med at rense vores opfattelse af den robot. brug udvælgelse værktøj (v) at udvælge de tæt side af robot (ben og krop).skift til den direkte udvælgelse værktøj (a) og trække den side af kroppen i et hjørne på linje med tilsvarende hjørne på forsiden. nu får en kopi af side (ctrl + c, ctrl + v) og trække dette eksemplar til den anden side af robot med den samme metode til at bringe de punkter (se venstre side af billedet). for at gøre i toppen af kroppen, skift til betragtning ved hjælp af ctrl + y og bruge pennen værktøj (p) for at forbinde de fire punkter, på toppen af kroppen (på samme måde, som vi gjorde på toppen af hovedet.skifte mening tilbage ved at slå ctrl + y igen.,, trin 12, nu skal vi fokusere på benene.sidespejlet af ben, der allerede er på plads, så vi kan bruge det som en vejledning til forsiden.de direkte valg værktøj (a) at udvælge punkter i par, kan vi flytte den form for overensstemmelse med de sider.use skift klik til at udvælge to ting på én gang, og trække dem op med den side af ben.en klog leder vil hjælpe dig op,.,, når du er færdig med ét ben, bruge udvælgelse værktøj (v) at vælge alle de former og lave en kopi (ctrl + c, ctrl + v).holdning, den nye kopi som det andet ben på robot.nu slog ctrl + forskydning + [at bevæge benet til den laveste lag, således at det er bag den robot er lig.slette de uudnyttede former for at rydde op i det billede, trin 13, på dette punkt liget af den robot, skal være fuldstændige, og vi kan gå videre til den arme. først lave en kopi af den robot, og gruppen hoved og krop separat.ændring af slagtilfælde farve grå.isoler de forskellige arm former og ssr - dem i front og sidespejle.,, armen består af fire dele: skulderen, overarmen, armen og kloen, starter vi med at arbejde på armen, da det er den nemmeste at manipulere.linje forsiden og side former af armene op med den grå krop og hinanden.tilpasning af punkter på den side af underarmen på linje med front, sørg for at udvælge de punkter i par at opretholde perspektiv. brug pennen værktøj (p) at udfylde resten af underarm.for dette skridt, det hjælper med til at lave kopier af former for anvendelse som retningslinjer (som vi gjorde med hoved og krop), punkt 14, den vanskelige del af armene er cylinderen, der forbinder skulder med robottens underarm.for at gøre denne form, vi starter med at tegne en cirkel, og en kopi af det (ctrl + c, ctrl + v).nu ssr - en cirkel til passer på den side af robot, og ssr - andre passer på toppen af den arm.holdning til disse kredse på skulderen og toppen af underarmen, som vist. brug pennen værktøj (p) om at foretage en ny form, det ser ud som om det ville forbinde de to cirkler (som vist).vælg to cirkler, og den form, der forbinder dem med valget værktøj (v) og klik pathfinder> tilføje, at forme område, vil udvide til at fusionere dem i en form, bruge ctrl + [og ctrl +] korrekt holdning i denne form bag bakken på underarmen.,, trin 15, at den hule cylinder i skulderen, kræver, at vi deler det i to dele: del foran den arm og del bag det, komme med en kopi af skulder cirkel på den side af robot er organ (ctrl + c, ctrl + f).ved anvendelse af de vejledninger (hit ctrl +; at vende dem om), trækker den anden ring lidt at give skulder cylinder dybde (se nedenstående diagram). anvendelse af tilføje anker punkt værktøj (+) at tilføje punkter på kanterne af to cirkler, (se diagram, tilføje punkter på den røde cirkler).lav en kopi af former.en kopi af vil blive brugt til at gøre foran skulderen, og de andre for at få den tilbage, brug den direkte udvælgelse værktøj a) at fjerne unødvendige punkter på begge eksemplarer til ende med to linjer i hvert enkelt tilfælde.anvendelse af pennen værktøj (p), at forbinde punkterne.genindstille brikkerne sammen, og der har du det: en foran og en tilbage til din skulder. trin 16, nu kan vi lave robotten er klo ved brug af en teknik, som hvordan vi lavede den skulder. tag ssr - havde klo former og stiller dem op på guider.når op i kø, figurer, bare tage ethvert punkt på den ene form, stil op med en guide, så sørg for det tilsvarende punkt i det andet objekt på samme sted.her har jeg valgt den øverste venstre hjørne på hver klo som referencepunkt, og som du kan se, de er anbragt på samme retningslinjer. lav en kopi af forsiden af klo, og bruge side som en bredde reference (som vist nedenfor) for at denne kopi som tilbage til formålet.,, efter at vi har brugt ud af klo til at bestemme den bredde, den form, ikke længere er nødvendig, og vi kan slette det. vi vil begynde udfyldningen af klo ved den grønne form i det objekt nedenfor.en kopi af de to halvdele af klo, og slette alle de punkter, der ikke vil få på den anden side af klo ved hjælp af den direkte udvælgelse værktøj (a) og slette nøgle.næste brug pennen værktøj (p) til at forbinde de to halvdele.nu kan vi holdning siden af tilbagebetalingen til vores formål. med den samme teknik, som vi kan fylde på indersiden af klo (violet), og for fuldstændighedens skyld kan vi gøre den nederste kant og (blå).,, skridt 17, idet de forreste arm, vi kan bruge de samme metoder for at beregne den robot er anden arm. størstedelen af denne arm kan kopieres direkte fra den første arm, og justeret med den direkte udvælgelse værktøj.robotten er hånd, for eksempel, er fuldstændig ens, så vi ikke behøver at tegne den.minder om, at isometriske objekter er samme størrelse, uanset hvor langt de er fra skærmen, i modsætning til korrekt perspektiv, så den arm er klo vil være af samme størrelse som den tæt på. gå 18, er det sidste, vi er nødt til at tilføje, at den robot er hans rygsæk.jeg kan godt lide at lave en kopi af alt så langt, gruppe hver arm uafhængigt (ctrl + g), og justere slagtilfælde farve skal være lysere.på den måde kan vi holde hvert organ del særskilt for fremtidige redigerer (som den tilbage på, eller vil vi stadig robot), og det kan du se, hvad du arbejder på nu.,, bruger ssr - metode på side på baggrund af den rygsæk, vi har gjort tidligere, og derefter stilling på side af robot.da den rygsæk er buet, det behøver ikke meget arbejde at gøre, det passer ind i de isometriske perspektiv.hvis det ser ikke helt ret i, at de direkte valg værktøj (a), for at tilpasse de enkelte punkter. brug pennen værktøj (p) at gøre forsiden af gjorden i robottens skulder. her er jeg flyttet hoved og foran arm af vejen, så vi kan se, hvor let rygsæk er nødt til at gå.når den rygsæk, som er udarbejdet, kan vi tilføje disse figurer tilbage.,, skridt, 19, og der er han!at forene ham lidt, udvælge hele robot og ændre skriftvidden til en værdi.i dette tilfælde valgte jeg 1 pkt., men det afhænger af, hvor stor du har trukket deres sprite. denne robot er nu klar til nogle farver.,, gå 20, er det første skridt til at ændre slagtilfælde farve til noget mindre hård så sort.her har jeg valgt mørkegrå, men afhængig af deres sprite, du vil blande nogle farver. næste kan vi udfylde nogle base farver.use udvælgelse værktøj (v) at udtage hele robot (undtagen øjnene), og ændre fylde farve grå. vælg øjne, mund, tryk på knappen og skærm og ændre disse skal udfylde farve hvid.farve den orange og gøre den knap røde.,, gå 21, det næste skridt er at vælge en retning for lyskilden.jeg har besluttet at gøre det kom fra venstre, så ansigt til robot. skyggerne fra her, kan være så detaljeret eller så simpelt som du kan lide.jeg har valgt at holde skyggerne relativt enkel, og ignorere den kendsgerning, at visse ting kan kaste skygger over for andre.dette vil gøre det lettere at anvende sprite i tegnefilm senere. begynd med udvælgelse af alle former, som vil være i skyggen og ændre deres fylde farver for en mørkere grå.næste, udvælger alle former, som vil være direkte i lyset og fylde dem med en lighter, grå.for flade former, det er nemt, men skyggerne på hvælvede overflader, vil kræve mere arbejde.,, skridt 22, for at illustrere, hvordan kan vi så den hvælvede overflader, finder liget af den rygsæk., modtaget denne form, og pasta i front ved hjælp af ctrl + c, ctrl + f. skil dig af med den slagtilfælde, og fastsætte fylde farve på en mørk orange. nu kan vi bruge slette anker punkt redskab (-) for at reducere denne form, og så er den direkte udvælgelse værktøj a) at tilpasse det i form af en skygge.at fastsætte de slag, vi laver en kopi af den krop og sæt det ind foran.fjern fylde på denne nye form, og videre (ctrl +]), for at sige det foran skygge form.,, bruge denne metode til at gøre skygger for resten af den rygsæk, såvel som for de andre hvælvede overflader såsom flaskerne i armene og antennen.,, skridt, 23, at give robotten lidt mere karakter, kan vi tilføje nogle fremhæver, at hans led og fødder. jeg har lavet det håndled og fødder en mørkere grå og albuer og fødder lighter.jeg har også lavet øjnene lidt mørkere for at få dem til at holde ud.husk den lyskilde, ved at tilføje flere farver, som du har brug for at holde skygge konsekvent.,, skridt 24, til at gøre den robot er en smule mere, kan vi give ham lidt tykkere skitse., udvælge hele robot - og pasta i front (ctrl + c, ctrl + f).klik pathfinder> tilføje, at forme område, vil udvide til at få en enkelt kombineret form.ændre fylde farve til white, så vi kan helt klart den nye form. denne form, vil sandsynligvis blive en smule rodet (på grund af den kendsgerning, at nogle former, ikke er noget, så vi kan bruge fjerne anker punkt redskab (-) til at rense det lidt op ved at fjerne de grimme ting.fokusere på at sikre, at den ydre mest kanter er glat, som det vil være alle, kan vi se, når vi er færdige. nu bruger slagtilfælde vindue til at ændre hjørnet type til midten mulighed, "rund med".dette vil gøre de hjørner glat.øge skriftvidden af denne form for 3pt.,, udvælge skitsere form og tryk ctrl + forskydning + [til at sende denne form for meget tilbage. her er et billede af de to robotter side om side: en med oversigt og en uden.retningslinjerne samler robot er form, og vil hjælpe ham stå imod en mere kompliceret baggrund.,, gå 25, lad os give robotten noget at stå på.- da han skal anvendes på en isometriske vildtnævnet, et spil, de virker som et godt valg.få en plads og så ssr - det at være flad som toppen af en terning.position fliserne i robot ved hjælp af ctrl + forskydning + [til at flytte det til meget tilbage. gå 26, i det sidste skridt, vi giver den robot, en simpel skygge.en cirkel, og ssr - det at være flad som fliserne.ændre fylde farve til mørkegrå og dets uklarhed til ca. 15%.position skyggen under alt, undtagen fliser (ctrl + forskydning + [, da ctrl +] til at flytte den til et niveau).,, konklusioner, og der har vi det: en bedårende isometriske robot.brugen af disse teknikker for at gøre isometriske ånder til spil, for tekniske diagrammer, eller at tilføje en 3d - - til dit design.